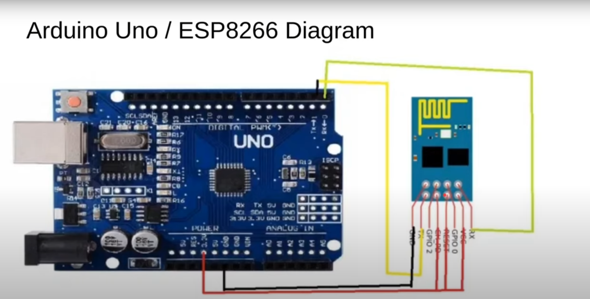
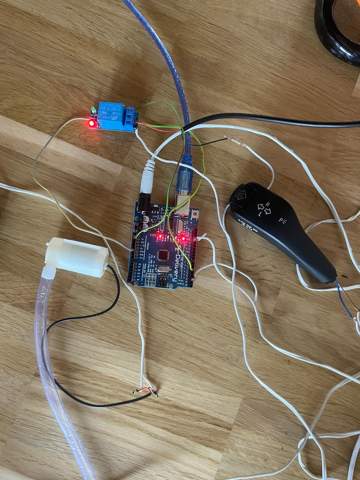
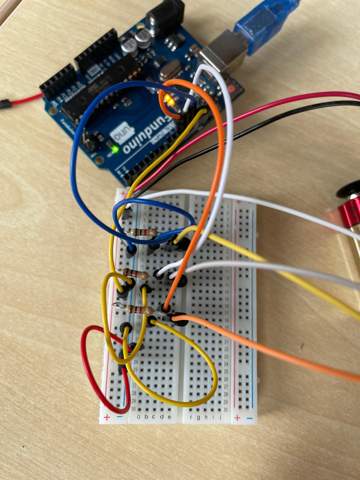
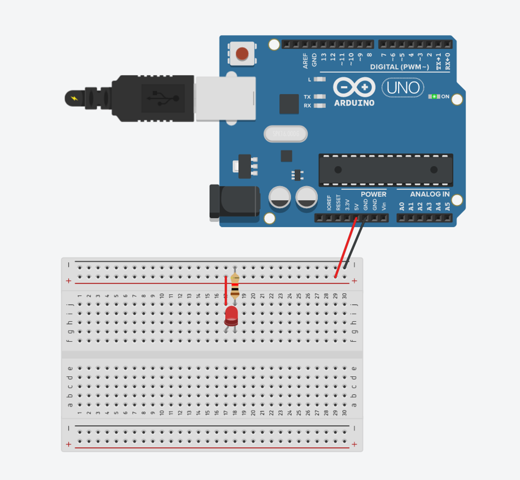
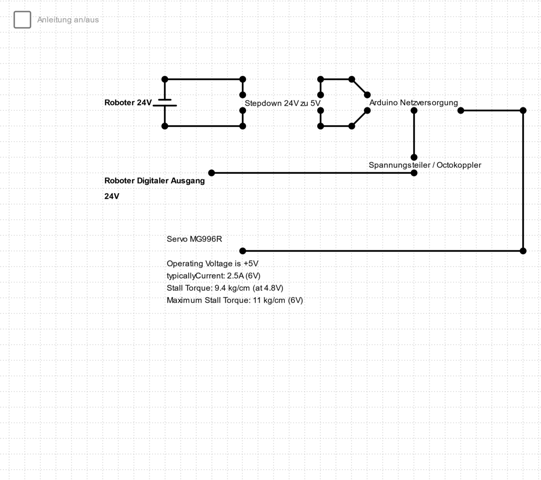
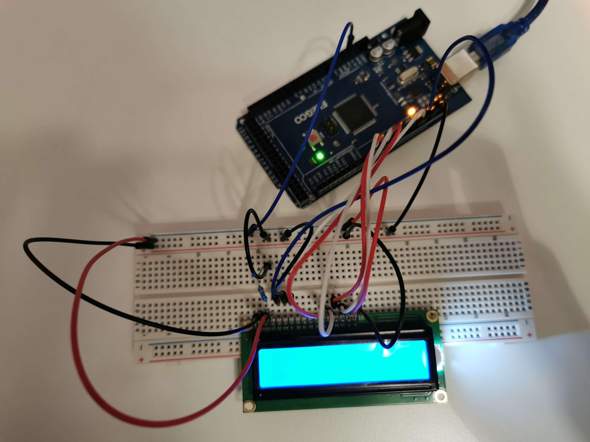
Hi, ich habe den Wifichip an den Arduino angeschlossen, wie hier:
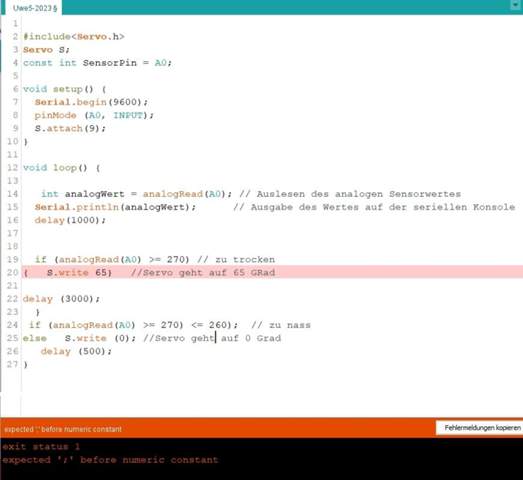
Ich habe die Bibliotheken importiert und als Board auch bei Tools > Board > ESP8266 > Arduino gewählt. Wenn ich aber diesen Code hochlade :
#include <Adafruit_NeoPixel.h>
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#define NUM_STRIPS 5
#define LED_PER_STRIP 60
const char* ssid = "#######";
const char* password = "########";
Adafruit_NeoPixel strips[NUM_STRIPS];
ESP8266WebServer server(80);
void setup() {
Serial.begin(115200);
// WLAN-Verbindung herstellen
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("Verbindung zum WLAN herstellen...");
}
Serial.println("Verbunden mit WLAN");
// Lichtstreifen initialisieren
int stripPins[NUM_STRIPS] = {2, 3, 4, 5, 6}; // An Ihre Verkabelung anpassen
for (int i = 0; i < NUM_STRIPS; i++) {
strips[i] = Adafruit_NeoPixel(LED_PER_STRIP, stripPins[i]);
strips[i].begin();
strips[i].show();
}
// Webserver-Routen festlegen
server.on("/", HTTP_GET, handleRoot);
server.on("/led/on", HTTP_GET, handleLedOn);
server.on("/led/off", HTTP_GET, handleLedOff);
server.on("/led/color", HTTP_GET, handleLedColor);
server.on("/led/brightness", HTTP_GET, handleLedBrightness);
server.begin();
Serial.println("Webserver gestartet");
}
void loop() {
server.handleClient();
}
void handleRoot() {
server.send(200, "text/html", "Willkommen bei der Lichtstreifen-Steuerung");
}
void handleLedOn() {
int stripIndex = server.arg("strip").toInt();
if (stripIndex >= 0 && stripIndex < NUM_STRIPS) {
strips[stripIndex].fill(strips[stripIndex].Color(255, 255, 255));
strips[stripIndex].show();
server.send(200, "text/plain", "Lichtstreifen eingeschaltet");
} else {
server.send(400, "text/plain", "Ungültiger Streifenindex");
}
}
void handleLedOff() {
int stripIndex = server.arg("strip").toInt();
if (stripIndex >= 0 && stripIndex < NUM_STRIPS) {
strips[stripIndex].clear();
strips[stripIndex].show();
server.send(200, "text/plain", "Lichtstreifen ausgeschaltet");
} else {
server.send(400, "text/plain", "Ungültiger Streifenindex");
}
}
void handleLedColor() {
int stripIndex = server.arg("strip").toInt();
int r = server.arg("R").toInt();
int g = server.arg("G").toInt();
int b = server.arg("B").toInt();
if (stripIndex >= 0 && stripIndex < NUM_STRIPS) {
strips[stripIndex].fill(strips[stripIndex].Color(r, g, b));
strips[stripIndex].show();
server.send(200, "text/plain", "Lichtfarbe aktualisiert");
} else {
server.send(400, "text/plain", "Ungültiger Streifenindex");
}
}
void handleLedBrightness() {
int stripIndex = server.arg("strip").toInt();
int brightness = server.arg("brightness").toInt();
if (stripIndex >= 0 && stripIndex < NUM_STRIPS) {
strips[stripIndex].setBrightness(brightness);
strips[stripIndex].show();
server.send(200, "text/plain", "Helligkeit aktualisiert");
} else {
server.send(400, "text/plain", "Ungültiger Streifenindex");
}
}
Kommt immer diese Fehlermeldung:
. Variables and constants in RAM (global, static), used 29040 / 80192 bytes (36%)
║ SEGMENT BYTES DESCRIPTION
╠══ DATA 1504 initialized variables
╠══ RODATA 1320 constants
╚══ BSS 26216 zeroed variables
. Instruction RAM (IRAM_ATTR, ICACHE_RAM_ATTR), used 60527 / 65536 bytes (92%)
║ SEGMENT BYTES DESCRIPTION
╠══ ICACHE 32768 reserved space for flash instruction cache
╚══ IRAM 27759 code in IRAM
. Code in flash (default, ICACHE_FLASH_ATTR), used 271296 / 1048576 bytes (25%)
║ SEGMENT BYTES DESCRIPTION
╚══ IROM 271296 code in flash
esptool.py v3.0
Serial port COM3
Connecting........_____....._____....._____....._____....._____....._____....._____
A fatal esptool.py error occurred: Failed to connect to ESP8266: Timed out waiting for packet header
Ich habe es auch schon versucht mit den Anschluss Flash in GND beim Arduino, hilf aber nicht
Weiß jemand was ich tun kann?
Vg Tmm