Frage
Bild zu PDF?
Hi, weiß zufällig jemand wie man Bilder von der Handy Gallerie in eine PDF umwandelt?
Liebe Grüße & Danke im Voraus!
Computer,
PDF-Datei
Hi, weiß zufällig jemand wie man Bilder von der Handy Gallerie in eine PDF umwandelt?
Liebe Grüße & Danke im Voraus!
Hallo zusammen,
Ich habe gestern angefangen Notruf Hamburg auf dem PC zu spielen. Und komme noch nicht so ganz mit der Steuerung klar vielleicht könnte einer von euch mir ja helfen.
Viele Grüße Tommy
Heyo, hab mir vor Kurzem den Pc geholt: https://www.dubaro.de/Partner/HardwareDealz-Editionen/HardwareDealz-1500-Edition::3686.html
kann mir jemand einen passenden Monitor empfehlen? (So ca bis 120€)
Hi,
Würde gerne mal wissen ob die Teile so zusammenpassen.
VG
Bitcoin hat eine hohe Volatilität und es kann auch vorkommen, dass die Cryptowährung mal viele Jahre wenig wert ist.
Ich überlege mir aktuell, ob ich mir eine Mikrofonhalterung für mein HyperXQuadcast kaufen soll, aber bin mir noch sicher, ob sich so etwas wirklich lohnt.
Deshalb die Frage, lohnen sich Mikrofonständer?
Hallo und zwar ich will ein PC bauen und ich wollte wissen ob alle Teile zusammenpassen, ob ich einen bottleneck haben werde oder lieber ein anderen Komponenten nehmen könnte.
Danke im voraus!
https://de.pcpartpicker.com/list/XyWd28
Hi,
Ich baue mir nen neuen PC und darein kommt ein Ryzen 9 5900X und eine RTX 4060 TI Ventus 3X.
Reichen mir da 750 Watt?
VG,
Luca
Ist es möglich diese drei Boxen an einen Computer anzuschließen?
Wenn ja, wie und oder was würde ich dafür brauchen?

Ich habe windows 10, kann ich nun kostenlos zu windows 11 upgraden oder kostet es was?
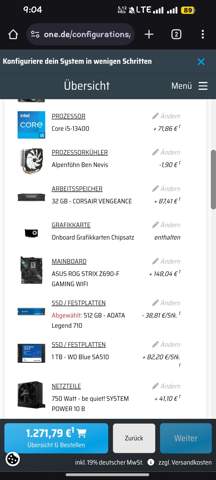
sollte ich einfach den teuersten nehmen oder lieber einen anderen aus den Fotos?
falls die Unterschiede nicht so groß sind würde ich nicht den teuersten nehmen

Hallo, ich wollte mir seit längerem nen gaming PC bauen und habe gerade diese Leiche auf der Straße gefunden, ist davon noch etwas brauchbar?

Wo kann man gute fertig gebaute pcs kaufen?(1000€ +-)
Hallo,
nutzt ihr auf euren Geräten (PC, Smartphone, Tablet) den Nachtmodus / Blaulichtfilter bevor ihr schlafen geht?
Wenn ja, gerne auch dazu schreiben, wie lange vor dem Schlafen gehen ihr ihn nutzt.
Liebe Grüße! :)
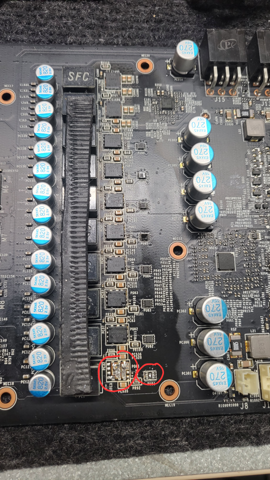
Hallo, mein Kabel ist (glaube ich) am Anschluss angebrannt.
Ich habe gemerkt, dass das Kabel komplett heiß war und an der Spitze ein bisschen Schwarz ist (siehe Bild)
Am restlichen Kabel ist allerdings nichts. Ist es verbrannt? Kann ich es trotzdem noch nutzen? Ich brauche das Kabel nämlich sehr dringend.
was hat es für Gründe? Das ist mir noch nie passiert und ich habe in meiner Steckdose noch andere Kabel dran da ist nichts passiert.
So sieht es aus.

Moin, um das ein wenig abzukürzen habe ich eine Umfrage erstellt. Es geht um eine CPU und GPU Kombination da ich nur über ein gewisses Budge verfüge. Mfg
https://zuhausejobs.com/
Also wenn ich auf FHD zocke?
Danke im voraus!
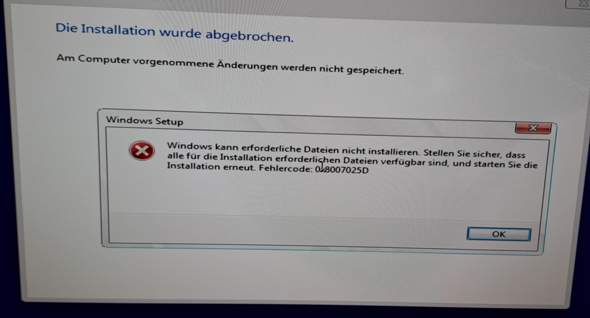
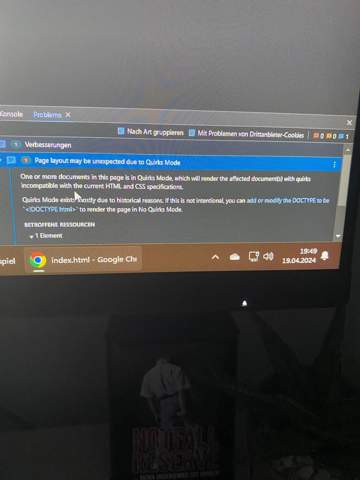
moin bin dabei java script zu lernen und habe probleme mit der index.html datei. Mein script wird auf der seite nicht ausgeführt und folgende problemschilderung wird angezeigt:
Ich weiblich 14, frage mich ob ich eine schlechte Person bin wenn ich Roboter teilweise niedlicher als kleine Kinder finde?
Vorher gab es die Info nur unten, jetzt ist es auch direkt unter der Frage zu sehen
https://geizhals.de/wishlists/3822084
Ich mache das nur weil es mir Spaß macht. So viel Geld um die Teile zu kaufen hab ich eh nicht. Mich würde es trotzdem interessieren wie ihr die Konfiguration so findet. Alle Lüfter sollen einheitlich sein. Deswegen vorne die 420mm aio oben 2x 140mm Lüfter. Dann hinten 1x 140mm Lüfter. Und seitlich noch 2x 140mm Lüfter es soll auch keine Glas seite sein. Und ganz ohne RGB. Das Desing gefällt mir so. Das soll ein Arbeits und gaming Pc sein.
Moin weiß jemand wo ich defekte Funkmeldeempfänger für ein Filmprojekt kriegen kann? Oder hat jemand welche
Ich habe der Ki befohlen, ein Bild zu erstellen, von der Erde, 12 Jahre nachdem die AfD an die Macht genommen ist.
Das kam raus: