kann man bei einer Tiefpassauslegung bedenkenlos zwischen kontinuierlich/diskret wechseln?
Also, wenn man ein zeitdiskretes Frequenzspektrum hat, anhand dessen einen kontinuierlichen Tiefpassfilter auslegt, der dann wiederum wieder zeitdiskret umgewandelt wird.... ist so etwas möglich ohne dabei zu ungenau zu werden?
4 Antworten

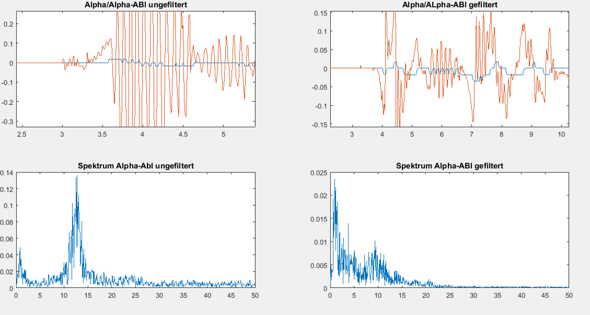
Oben links sieht man nun die Sensorwerte WÄHREND DER REGELUNG. (Winkel blau und Ableitung des Winkels rot). Es fällt nun auf, dass der Ableitungswert auch schwingt, während sich der Winkel nicht ändert. Könnte das eine Störung sein? (Motor-und Sensorleitungen liegen nahe beieinander)
Unten links sieht man das Spektrum der Ableitung und man sieht auch den Peak zwischen 10 und 15 Hz....
Nun habe ich ein PT1 Glied bei Eckfreqeuenz von 11 Hz ausgelegt und rechts oben und unten sieht man die entsprechenden Resultate des geregelten Systems. Es ist hier deutlich ruhiger. Aber habe ich nun eine Störung beseitigt, oder einfach nur die Auflösung verbessert?
nein, das sind beides Sensorwerte. Ich vermute, dass der Sensorwert der Ableitung (rot) einer Störung unterliegt. Was meinst du?
PS: Auch bei der Filterung habe ich im Bild die REINEN Sensorwerte aufgezeichnet
Ich kenne den sensor nicht. Was ist das für einer? Der Sensor liefert gleichzeitig Winkel und Beschleunigung? Wie werden diese Größen intern gemessen? haben beide die selbe Quelle, oder werden sie voneinander abgeleitet? Hast du ein Datenblatt? Jetzt geht es schon ziemlich in die Details, ohne die man auf die Frage aber nicht eingehen kann.
es handelt sich um einen EV3 Gyro-Sensor von Lego, leider gibt es dazu keine genauen Angaben bzw. Datenblätter... auf manchen Websiten wird vermutet, dass intern für beide Werte zwei Sensoren verbaut sind
Hier schwingt einfach was. Störungen sind das keine, zumindest keine stochastischen.
wie begründe ich nun am Besten, dass ich den Tiefpass auslege? Das Ganze muss nämlich für einen studentische Arbeit aufgeschrieben werden ;) In der Praxis funktioniert es ja mit der Filterung hervorragend
Das kann man nicht beantworten. solange man das System als ganzes nicht modellieren kann. Kommen dei Schwingungen erst durch die Regelung (Rückkopplung) oder sind die auch bei offener Schleife vorhanden? Ich tippe auf ersteres. Regelungen schwingen einfach gerne...aber das wirst du wohl selbst wissen.
aber es ist ja deutlich zu sehen: Auch wenn sich der Winkel nicht ändert, schwingt der andere Wert weiter. Könnte es sein, dass die Schwingung des WInkels einfach nur nicht 1° übersteigt und somit nicht erfasst wird? In dem Fall wäre es ja günstiger die Auflösung des WInkels zu erhöhen, denn die Stellgröße reagiert vorher auf die Schwingung obwohl sich der Winkelwert nicht ändert
Ohne zu wissen, wie der Sensor funktioniert oder den einmal zu 100% verstehen, hat das alles nur den Chrakter von Kafeesudlesen. Vielleicht werden rote und blaue Werte mit völlig verschiedenen Methoden gemessen.
Schwingt es nur in der Regelstrecke? Schwingt es auch, wenn man nur "misst", d.h. ohne Regelung?
Zu verstehen, warum das Einbringen eines Tiefpasses an einer bestimmten Stelle des Regelkreises zu einer Verbesserung der Reglerqualität führt, ist die Aufgabe der Regelungstechnik. Man kann eine optimale Reglereinstellung manchmal auch durch Herumprobieren finden, besonders bei einfachen Regelstrecken. Aber du sollst es ja wissenschaftlich betrachten, und so musst du alles zusammen mathematisch beschreiben, und nicht bloß eine Komponente daraus.
wenn ich ihn händisch bewege, schwingt er ganz normal. Vermutlich, weil ich ihn immer über die 1° hinausbekomme.
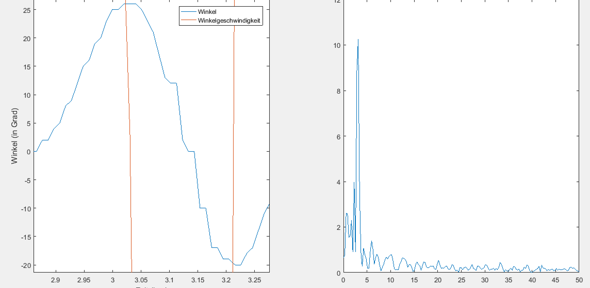
Wenn ich mir die Geschwindigkeiten bei der Schwingung auf dem Bild angucke, fällt auf, dass die Auslenkungen deutlich unter der Zeit liegen, nämlich weniger als 1°/10 ms.... (10 ms ist die Abtastzeit) also ich halte es für wahrscheinlich, dass der Sensorwert der roten Kurve deutlich empfindlicher ist. Dieser Zustand geht im Modell aber mit einer viel kleineren Gewichtung ein als der absolute WInkel...
Wie gesagt handelt es sich bei dem Sensor im Prinzip um "Spielzeug" von Lego und ich komme nicht an Daten
und wenn ich die Winkelgeschwindigkeitswerte (rot) nehme und daraus das Integral berechne, komme ich für den berechneten WInkel IMMER auf deutlich kleinere Auslenkungen als der gemessene WInkel hat... das wäre eigentlich ein Indiz dafür, dass die Schwingung zu stak ist, oder?
Das ist eine durchaus gängige Vorgangsweise:
Man verwendet dazu u.A. auch die Bilineare Transformation.
Eine mathematisch anspruchslose und praxisnahe Einführung dazu gibts im Tietze Schenk - das funktioniert und ich mache es immer so, weil es einfach Spaß macht:



Man muss aber sagen, dass es heutzutage gute Tools gibt, wo man die Filterkoeffizienten einfach berechnen lassen kann, ohne vorher auf ein analoges Filter zu gehen.



in meinem Fall will ich ein diskretes Frequenzspektrum mit einem PT1-Glied filtern, also im Prinzip nur die Knickfreqenz und die Verstärkung aus dem Spektrum bestimmen und im Zeitbereich dann entsprechend die zeitdiskrete Variante benutzen um die EIngangssignale zu filtern... wie sieht es dabei aus?
Ich bin jetzt verwirrt. Reden wir vom Gleichen?
Du hast nun ein diskretes Frequenzspektrum oder ein diskretes Zeitsignal. Ich rede von zeitdiskreten Signalen, du von analogen Signalen mit diskreten Frequenzen? Oben sprichst du aber wiederum von zeitdiskret...
Was hat du nun? Abtastwerte zu bestimmten Zeiten? Ein analoges Signal?
Was meinst du mit " nur die Knickfreqenz und die Verstärkung aus dem Spektrum bestimmen" ? Du hast ein Spektrum mit Knickfrequenz? Ein Filter hat eine Knickfrequenz...nicht ein Signal. Ich wüsste nicht was die Knickfrequenz eines Signals sein sollte?
Ich glaube ich hab deine Frage total falsch verstanden. Kannst du sie so formulieren, dass es eindeutig ist?
ich habe Sensorwerte zunächst im Zeitbereich aufgenommen und habe nun das Ziel, die schlechte Auflösung durch Glättung zu verbessern.
Also habe ich mit dem MatLab-Befehl fft das einseitige diskrete Frequenzspektrum geplottet und möchte anhand dessen einen kontinuierlichen Filter (hier das PT1-Glied) auslegen... also alle hohen Frequenzen jenseits der Nutzfrequenz sollen unterdrückt werden..... nun ist das PT1-Glied (charkateristische Werte Verstärkung K und Zeitkonstante T) dann aber erst mal zeitkontinuierlich
hast du die Daten in gleichen Zeitschritten?
Um Frequenzen zu unterdrücken brauchst du einen Tiefpass. Eine fft ist nicht erforderlich, außer du magst es unbedingt so machen.
Für die Berechnung des zeitdiskreten Tiefpassses braucht du
- die Abtastfrequenz (=1/Zeitschritt)
- die Grenzfrequenz
Damit kannst du das Filter bestimmen.
Wie sieht das bei dir aus?
Was ist die höchste auftretende Frequenz im Signal. Diese muss kleiner sein, als die halbe Abtastfrequenz, da du sonst Aliasingeffekte hineinbekommst. Diese kannst du im Nachhinein nicht mehr eliminieren. Deshalb verwendet man immer ein analoges Anti-Aliasing Filter.
ich habe den fft-Befehl genommen, weil es für mich die erste Methode war um den Frequenzbereich erst mal sichtbar zu machen. Die Abtastfrequenz beträgt 10 ms und ich kann den Sensor auch theoretisch alle 1 ms abtasten. Das spätere System hat dann aber eine Programmlaufzeit von 10 ms, deshalb wollte ich die Bedingungen gleich lassen..
es handelt sich um einen Sensor, der einen Winkel ausgibt. Ich habe ihn zum Test mit der Hand hin und her bewegt...
Somit existiert ein deutlicher Peak bei 4 Hz und es sieht so aus, als müsste man die Grenzfrequenz zwischen 10-15 Hz wählen
Welche Frequenzen willst du noch verarbeiten? Wenn du die Grenzfrequenz 10Hz wählst, dann wäre bei einem Filter erster Ordnung ein Signal mit 10Hz bereits um -3dB abgeschwächt. Ist dir das klar?
schlechte Auflösung? wie groß ist diese? Kannst du das benennen?
Wenn du zB bloß 16 Schritte (Beispiel) hast und der Sensor geht von 10 auf 11, dann hilft dir ein Tiefpass doch nichts, denn ein sprungartiger Wechsel von 10 auf 11 geht dann halt langsamer und stetiger, aber das ist glaub ich nicht was du möchtest. Du benötigst eher einen Interpolator, der dir Zwischenwerte liefert.
nun ja, die hohen Frequenzen müssen halt raus, damit die Flanken nicht so steil werden. Die Anwendung ist übrigens die Stabilisierung eines inversen Pendels um die instabile Ruhelage.. große Frequenzen sind da ja ohnehin nicht gewünscht, oder?
Gerade weil die Linearisierung ja nur eine kleine Auslenkung aus der Ruhelage abdeckt
Auflösung ist 1 Grad... die Stellgröße ist dann wesentlich ruckliger. Mit einem gleitenden Mittelwert wird das Problem schon gelöst! Aber es soll "professioneller" gemacht werden
zeig mal, wie das Signal aussieht...wir reden sonst aneinander vorbei. Zeig, wo das Problem ist anhand eines Beispiels, das du gemessen hast. Dann schauen wir, was man machen kann,
Ich könnte jetzt nur ein Foto von dem Frequenzspektrum liefern, die anderen Daten habe ich nicht hier zu Hause auf dem PC im Moment. Zu erwähnen wäre auch noch, dass die Ableitung des Winkels ebenfalls mit der schlechten Auflösung gemessen wird. Vermutlich wäre die Filterung da noch wichtiger...
EIn gleitender Mittelwert über 24 Werte, während in einem Programmschritt (10 ms) 8 Sensorwerte ausgelesen werden, ist übrigens im Verhalten super! Aber da findet dann eine Phasenverschiebung statt
Zeig das Zeitsignal wenn du es wieder hast. Mein Verdach ist: du hast Quantisierungsrauschen. Um dieses zu vermindern, gibt es "Rauschformung", das sind Verfahren, die das Rauschen durch Überabtastung in einen Frequenzbereich verschieben, der weniger stört. Im einfachsten Fall geht das mit einem Interppolationsfilter.
ich habe doch noch was auf dem Rechner gefunden! Ich plotte das gleich mal mit Matlab und poste es als neue Antwort hier auf diese Frage... (hier im Kommentar ist leider kein Bildhochladen möglich)
Hier ist das Zeitsignal (Aufgetragen in Sekunden, Abtastzeit 10 ms) und rechts daneben das einseitige Frequenzspektrum.
Der gleitende Mittelwert hatte das Signal im Zeitbereich sehr schön geglättet, wies aber eine deutliche Phasenverschiebung zum Original auf... im Frequenzbereich wurden dadurch die höheren Freqeunzanteile eliminiert und das möchte ich jetzt gezielter haben....

schau ich mir an. das ist schon mit der glättung? gemessen wird der winkel? und die stufen sind die Quantisierungsstufen des sensors? wie weit sind die auseinander?
nein, das ist das reine Sensorsignal. Die Glättung (Daten leider nicht vorhanden) macht eine schöne sinusförmige Kurve und die Stellgröße verhält sich mit ihr wesentlich ruhiger beim Balancieren.
Zu den Stufen: Der Sensor hat eine Auflösung von 1 Grad und wird hier in 10 ms abgetastet (Zeitachse auf dem Bild ist in s)
und wo ist das Problem mit dem Signal, dass du einen Tiefpass brauchst? diese Ecken sind ja vermutlich echt und kein Artifakt.
naja ich sagte doch die Auflösung ist einfach zu schlecht für die Anwendung. Ohne Filterung läuft es sehr ruckelig.... wenn ich die Ecken glätte, verhält sich die Stellgröße der Regelung sehr ruhig
diese ecken die man im bild sieht? woher kommen die? die sind ja echt...
ja und die sollen geglättet werden. Es muss ja einen Grund haben, warum das Regelungsverhalten mit einem gleitenden Mittelwert wesentlich besser wird (allerdings auch über den Winkelgeschwindigkeitswert, der aber die selbe Auflösung hat)
Ich kann dir jetzt nicht mehr folgen.
Zuerst dachte ich, du magst bloß bandbegrenztes Rauschen wegfiltern.
Diese Ecken in deinem gebersignal müssen doch irgendwoher kommen (du änderst den Eingang auf die Strecke, schaltest ein- und aus oder was weiß ich...). Wenn alles still stehen würde, hättest du ein konstantes Signal. Hier tut sich was. Aber es ist ja die Aufgabe der Regelung, hier das gewünschte Regelverhalten zu erbringen. Wenn du hier einen Tiefpaß einbaust, dann ist dieser ja schon Teil der Regelung.
Wenn du wissen willst wie man einen Tiefpass zeitdiskret realisiert, kann ich dir helfen. Aber wozu du den brauchst, kann ich in diesem Rahmen nicht beurteilen. Jedenfalls ist klar, dass es zu einer Phasenverschiebung kommt - das ist eine Grundeigenschaft jedes Tiefpasses.
also nochmal: in diesem Bild hier wird der Sensor zur Untersuchung nur per Hand bewegt. Während der Regelung ruckelt es, wenn die reinen Sensorwerte (Winkel und Ableitung) ausgelesen werden, während bei einer gleitenden Mittelwertbildung das Verhalten sehr ruhig ist und auch Störungen besser ausgeregelt werden können... Es kann tatsächlich auch sein, dass leichtes Rauschen in Kombination mit den Motoren (Stellgröße) auftritt
Man konnte im Frequenzbereich auch sehen, dass das gefilterte Spektrum in den höheren Frequenzen ab 20 Hz auch deutlich unterhalb dessen war, was man hier beim Originalsignal sieht....
Mein Beteuer sprach erst von Oversampling, sagt aber dann beim Sehen der Daten, dass ich ein PT1-Glied draufgeben soll... so hätte ich etwas Vorzeigbares, was im Frequenzbereich ausgelegt wurde
ich hätte jetzt noch mal neue Erkenntnisse und weitere Bilder. ich weiß aber nicht, ob ich die richtig interpretiere. Könntest du mir helfen? Ich komme einfach nicht weiter
wobei genau? Ich kann dir erklären, wie man ein digitales Filter realisiert, das einen bestimmen Frequenzganz hat. Ob das Filter dann in deinem Kontext Sinn macht, kann ich aber nicht beurteilen. Natürlich wird eine unebene Kurve geglättet und das geht mit einer Phasenverschiebung einher - das ist aber selbstverständlich.
ich habe Bilder als neue Antwort hochgeladen. Dort vergleiche ich die reinen Sensorwerte während der Regelung einmal ungefiltert und dann mit Filter...
Kommt darauf an, wie du rechnest, und was du unter "zu ungenau" verstehst.
Deine Frage ist zu ungenau.
>Es fällt nun auf, dass der Ableitungswert auch schwingt, während sich der Winkel nicht ändert. Könnte das eine Störung sein?
BERECHNEST du die Ableitung aus dem Winkel ? Oder wie kommt die rote aus der blauen Kurve zustande?