Hallo liebe Community,
ich wollte ein Projekt starten, undzwar eine Art Roboterspinne bauen. Ich bin im Besitz eines 3D Druckers, sodass die mechanischen Teile (noch) nicht das Problem darstellen. Das größte Problem liegt bei mir in der Elektronik, weil ich nur sehr schwache elektrotechnische Kenntnisse habe.
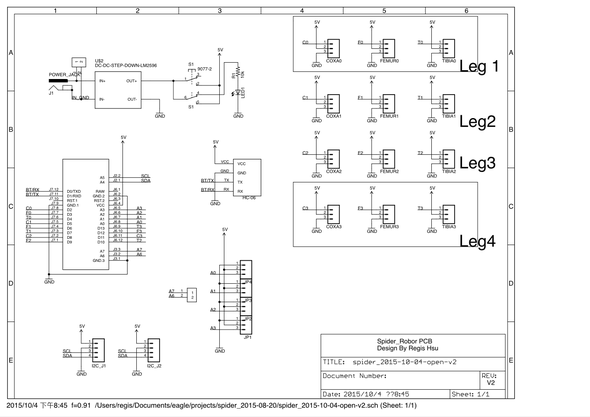
Könnt ihr helfen diesen Schaltplan zu erklären wo ich was anschließen muss, damit ich mir ein besseres Bild von der Sache machen kann?
Diese Bauteile liegen bei mir vor und müssten auch so im Schaltplan vorhanden sein:
- Arduino Pro Mini Mikrocontroller
- 3000mAh Lithium Batterie (DC 12300)
- 12V Niedervolt Steckverbindung mit 3 Lötfahnen
- DC/DC Voltwandler 12V/5V - 3A Output
- 1 taktiler Schalter mit 6 Ein und Ausgängen (Lage im Schaltplan bekannt)
- 680 Ohm 1/4 Watt 5% Wiederstand (kann ich im Schaltplan sehen)
- 3mm blaue Led (Anschlussrichtung bereits bekannt)
- 5x7cm Lochrasterplatine
- 12 SG90 9g Servomotoren
- Männliche und weibliche Stiftleiste
Nun meine Fragen: Wo muss ich die 5V anschließen und wo GND (Ground)? So wie ich das verstanden habe ist 5V + und GND -. Aber an welches Bauteil muss ich die Verbindung explizit anschließen? Sogut wie alle Bauteile weisen diese Verbindung auf.
Was bedeutet dieses Symbol bei J1? Konnte dazu nichts näheres finden und was muss ich bei dieser Verbindung besonders beachten?
Wie schliesse ich den Power Jack (Niedervolt Steckverbindung) richtig an? Was bedeutet IN_GND? Ich habe ja nur die 3 Lötfahnen und weiß nicht wie ich das verbinden soll.
COXA, FEMUR, TIBIA und JP sind alles Stiftleistenverbindungen richtig?
Ich wäre euch sehr sehr dankbar wenn ihr mir helfen würdet!