Mit Bildern
Programm mit Microbit?
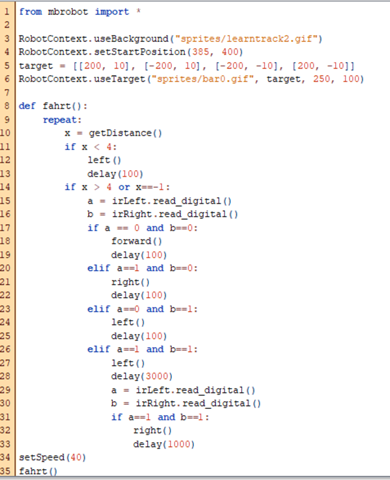
Ich muss für ein Schulprojekt ein Programm schreiben, dass den Microbitroboter ein Labyrinth fahren lässt. Dieses Labyrinth besteht aus drei Teilen bei einem Teil muss der Roboter einer schwarzen Linie folgen. Beim zweiten Teil muss der Roboter mithilfe des Ultraschallsensors, die Wände
erkennen und entsprechend handeln. Beim dritten Teil wird der Infrarotsensor und der Ultraschallsensor kombiniert. Könnte mir jemand bei diesem Problem helfen?
Ich hänge mein aktuelles Programm an, wenn das zum Verständnis hilft.
Programmiersprache,
Tigerjython