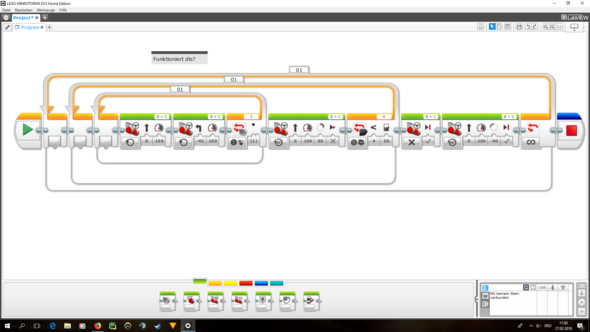
Funktioniert dieses EV3 Programm?
Der Roboter soll in der Lage sein sich in einem Feld frei zu bewegen, jedoch soll er es nicht verlassen. Das Feld ist rechteckig geformt und mit schwarzem Klebeband abgegrenzt. Außerdem befinden sich im Feld weitere Roboter, denen man ausweichen soll.
3 Antworten
vielleicht, vielleicht auch nicht. Probieren lautet die Devise! habe aber gehört dass die akkus von den ev3 schnell mach hochgehen können, also würde ich immer genug Abstand halten ;)
Nein, das kann nicht funktionieren!
Was macht Dein Programm?
- Die innere Schleife wird nur verlassen, wenn schwarz auf dem Farbsensor erkannt wird.
- Dann fährt es geradeaus, verläßt also ganz sicher den abgesteckten Kurs. Das macht es so lange, bis es ein Hinderniss erkennt. Dann wird die mittlere Schleife verlassen.
- In der äußeren Schleife fährt es zurück und alles beginnt von vorn.
Das Programm musst Du wohl noch einmal überarbeiten.
Hier noch ein paar Tipps:
Zu 1.: Den Farbsensor auf Reflektion einstellen. Helligkeitsunterschiede lassen sich sicherer erkennen als eine einzelne Farbe.
Zu 1 u. 2.: Die Schleifen werden erst verlassen, wenn das Schleifen-Ereignis eintritt. Alle anderen Ereignisse werden in der Zwischenzeit überhaupt nicht überprüft. Also musst Du in einer Schleife alle Sensoren nacheinander abfragen und darauf reagieren (z.B. Schalter). Nur dann können mehrere Dinge gleichzeitig agieren.
Zu den anderen Antworten:
- Es ist nicht Hilfreich Antworten zu geben, die nicht gefragt sind. (Akkus können hochgehen)
- Es ist falsch zu behaupten, das man ein Hinderniss besser über einen Farbsensor erkennen kann, als über einen Ultraschallsensor. (Im Programm ist ein Farbsensor für die Linie und ein Ultraschallsensor für die Abstandserkennung, nur das Programm ist nicht wirklich hilfreich)
Nicht vergessen: Wir haben alle mal klein angefangen!
Du musst einen FarbSensor statt den infarotsensor benutzen. Zu beispiel:(Wenn der Farbsensor schwarz sieht, soll er zurückfahren.)